Publications
* denotes equal contribution.
2026
- arxiv
 COVER: COverage-VErified Roadmaps for Fixed-time Motion Planning in Continuous Semi-Static EnvironmentsN. Ilampooranan, and C. Chamzas2026
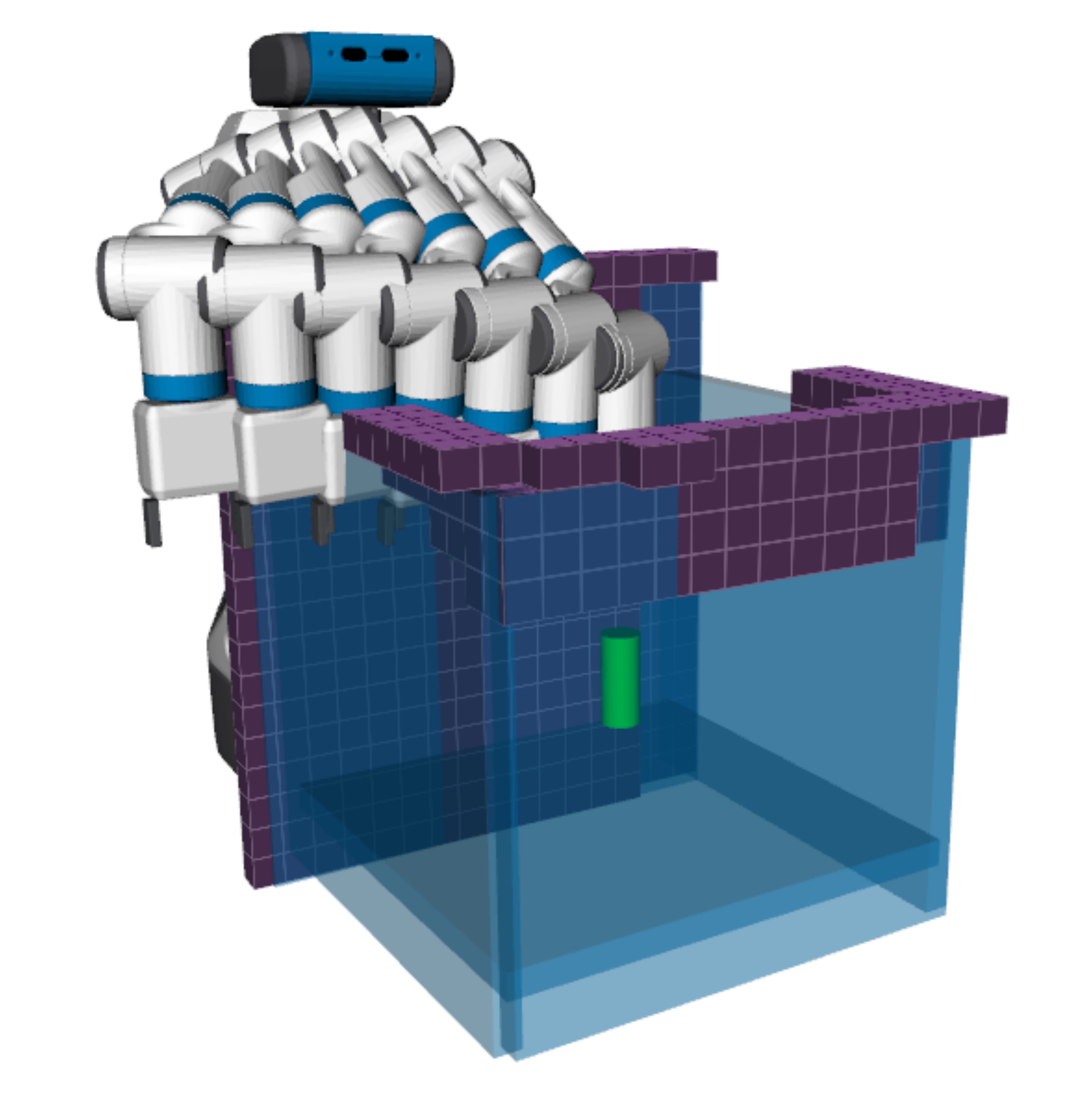
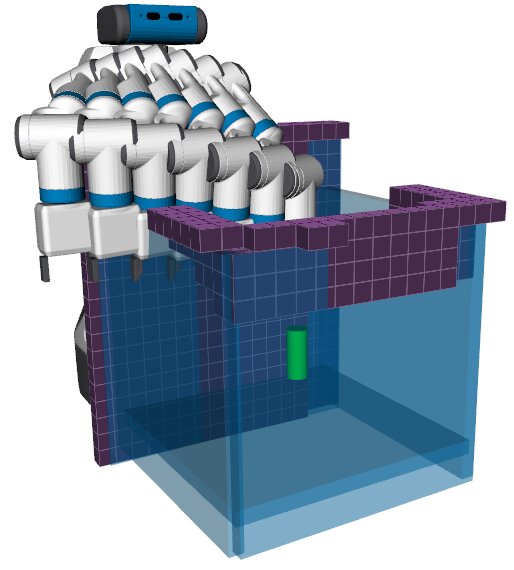
COVER: COverage-VErified Roadmaps for Fixed-time Motion Planning in Continuous Semi-Static EnvironmentsN. Ilampooranan, and C. Chamzas2026Having the ability to answer motion-planning queries within a fixed time budget is critical for the widespread deployment of robotic systems. Semi-static environments, where most obstacles remain static but a limited set can vary across queries, exhibit structured variability that can be systematically exploited to provide stronger guarantees than in general motion-planning problems. However, prior approaches in this setting either lack formal guarantees or rely on restrictive discretizations of obstacle configurations, limiting their applicability in realistic domains. This paper introduces COVER, a novel framework that incrementally constructs a coverage-verified roadmap in semi-static environments. By partitioning the obstacle configuration space and solving for feasible paths within each partition, COVER systematically verifies feasibility of the roadmap in each partition and guarantees fixed-time motion planning queries within the verified regions. We validate COVER with a 7-DOF simulated Panda robot performing table and shelf tasks, demonstrating that COVER achieves broader coverage with higher query success rates than prior works.
@misc{ilampooranan2025covercoverageverifiedroadmapsfixedtimemotion, title = {COVER: COverage-VErified Roadmaps for Fixed-time Motion Planning in Continuous Semi-Static Environments}, author = {Ilampooranan, Niranjan Kumar and Chamzas, Constantinos}, year = {2026}, eprint = {2510.03875}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, url = {https://arxiv.org/abs/2510.03875}, preview = {publication_preview/niranjan2026cover.png} } - ActivePusher: Active Learning and Planning with Residual Physics for Nonprehensile ManipulationIn IEEE International Conference on Robotics and Automation, 2026
(Top-3 finalist for best paper in Planning and Control)
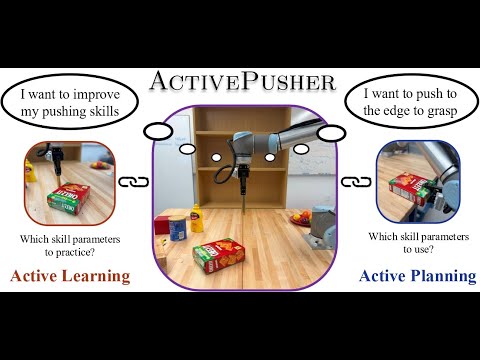
Planning with learned dynamics models offers a promising approach toward versatile real-world manipulation, particularly in nonprehensile settings such as pushing or rolling, where accurate analytical models are difficult to obtain. However, collecting training data for learning-based methods can be costly and inefficient, as it often relies on randomly sampled interactions that are not necessarily the most informative. Furthermore, learned models tend to exhibit high uncertainty in underexplored regions of the skill space, undermining the reliability of long-horizon planning. To address these challenges, we propose ActivePusher, a novel framework that combines residual-physics modeling with uncertainty-based active learning, to focus data acquisition on the most informative skill parameters. Additionally, ActivePusher seamlessly integrates with model-based kinodynamic planners, leveraging uncertainty estimates to bias control sampling toward more reliable actions. We evaluate our approach in both simulation and real-world environments, and demonstrate that it consistently improves data efficiency and achieves higher planning success rates in comparison to baseline methods.
@inproceedings{zhong2026activepusheractivelearningplanning, title = {ActivePusher: Active Learning and Planning with Residual Physics for Nonprehensile Manipulation}, author = {Zhong, Zhuoyun and Golestaneh, Seyedali and Chamzas, Constantinos}, year = {2026}, url = {https://arxiv.org/abs/2506.04646}, booktitle = {IEEE International Conference on Robotics and Automation}, month = may } - arxiv
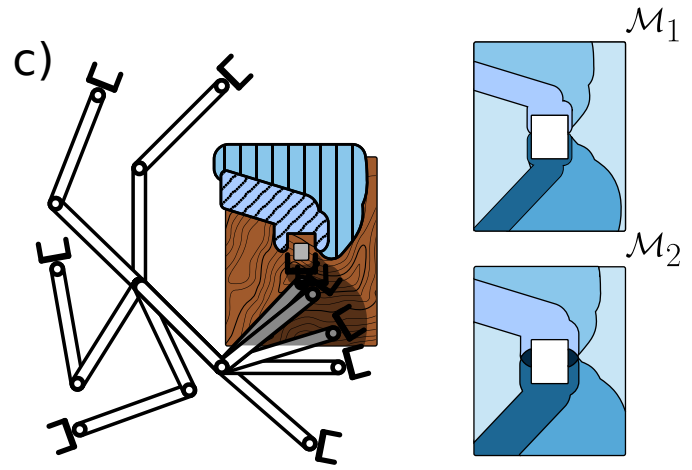
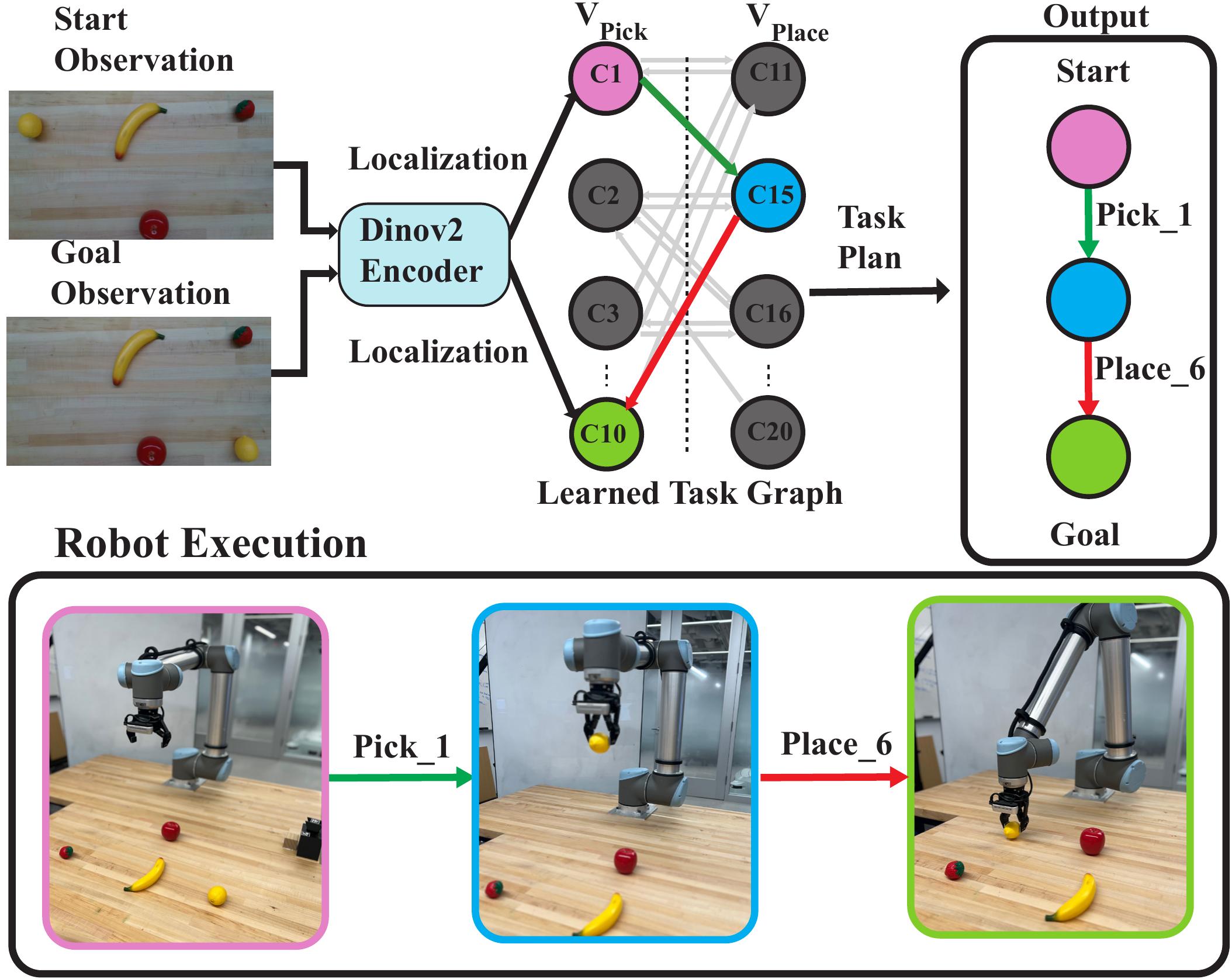 Learning Discrete Abstractions for Visual Rearrangement Tasks Using Vision-Guided Graph ColoringA. Ajith, and C. Chamzas2026
Learning Discrete Abstractions for Visual Rearrangement Tasks Using Vision-Guided Graph ColoringA. Ajith, and C. Chamzas2026Learning abstractions directly from data is a core challenge in robotics. Humans naturally operate at an abstract level, reasoning over high-level subgoals while delegating execution to low-level motor skills – an ability that enables efficient problem solving in complex environments. In robotics, abstractions and hierarchical reasoning have long been central to planning, yet they are typically hand-engineered, demanding significant human effort and limiting scalability. Automating the discovery of useful abstractions directly from visual data would make planning frameworks more scalable and more applicable to real-world robotic domains. In this work, we focus on rearrangement tasks where the state is represented with raw images, and propose a method to induce discrete, graph-structured abstractions by combining structural constraints with an attention-guided visual distance. Our approach leverages the inherent bipartite structure of rearrangement problems, integrating structural constraints and visual embeddings into a unified framework. This enables the autonomous discovery of abstractions from vision alone, which can subsequently support high-level planning. We evaluate our method on two rearrangement tasks in simulation and show that it consistently identifies meaningful abstractions that facilitate effective planning and outperform existing approaches.
@misc{ajith2026jlearningdiscreteabstractionsvisual, title = {Learning Discrete Abstractions for Visual Rearrangement Tasks Using Vision-Guided Graph Coloring}, author = {Ajith, Abhiroop and Chamzas, Constantinos}, preview = {publication_preview/ajith2026vggs.jpg}, year = {2026}, eprint = {2509.14460}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, url = {https://arxiv.org/abs/2509.14460} }
2025
- HSCC
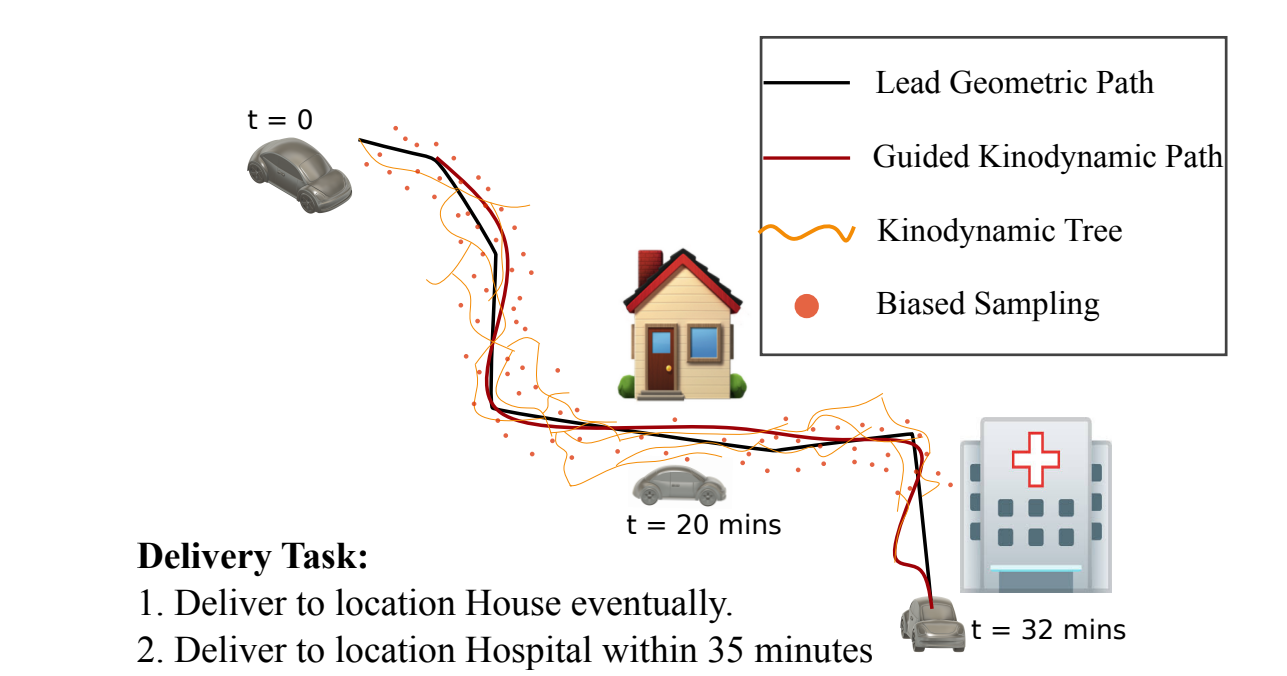 Multi-layer Motion Planning with Kinodynamic and Spatio-Temporal ConstraintsJ. Chatrola*, A. Ajith*, K. Leahy, and C. ChamzasIn Proceedings of the 28th ACM International Conference on Hybrid Systems: Computation and Control, 2025
Multi-layer Motion Planning with Kinodynamic and Spatio-Temporal ConstraintsJ. Chatrola*, A. Ajith*, K. Leahy, and C. ChamzasIn Proceedings of the 28th ACM International Conference on Hybrid Systems: Computation and Control, 2025We propose a novel, multi-layered planning approach for computing paths that satisfy both kinodynamic and spatiotemporal constraints. Our three-part framework first establishes potential sequences to meet spatial constraints, using them to calculate a geometric lead path. This path then guides an asymptotically optimal sampling-based kinodynamic planner, which minimizes an STL-robustness cost to jointly satisfy spatiotemporal and kinodynamic constraints. In our experiments, we test our method with a velocity-controlled Ackerman-car model and demonstrate significant efficiency gains compared to prior art. Additionally, our method is able to generate complex path maneuvers, such as crossovers, something that previous methods had not demonstrated.
@inproceedings{10.1145/3716863.3718041, author = {Chatrola*, Jeel and Ajith*, Abhiroop and Leahy, Kevin and Chamzas, Constantinos}, title = {Multi-layer Motion Planning with Kinodynamic and Spatio-Temporal Constraints}, year = {2025}, isbn = {9798400715044}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, url = {https://dl.acm.org/doi/10.1145/3716863.3718041}, doi = {10.1145/3716863.3718041}, booktitle = {Proceedings of the 28th ACM International Conference on Hybrid Systems: Computation and Control}, articleno = {5}, numpages = {7}, keywords = {Motion Planning, Robotics, Signal Temporal Logic}, location = {Irvine, CA, USA}, series = {HSCC '25}, preview = {publication_preview/ajith2025multilayerplanning.png} } - Image-Based Roadmaps for Vision-Only Planning and Control of Robotic ManipulatorsS. Chatterjee, A. Gandhi, B. Calli, and C. ChamzasIEEE Robotics and Automation Letters, 2025
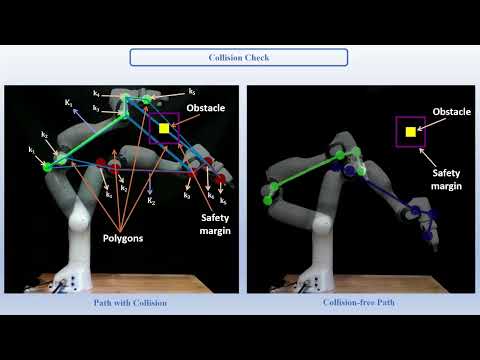
This work presents a motion planning framework for robotic manipulators that computes collision-free paths directly in image space. The generated paths can then be tracked using vision-based control, eliminating the need for an explicit robot model or proprioceptive sensing. At the core of our approach is the construction of a roadmap entirely in image space. To achieve this, we explicitly define sampling, nearest-neighbor selection, and collision checking based on visual features rather than geometric models. We first collect a set of image space samples by moving the robot within its workspace, capturing keypoints along its body at different configurations. These samples serve as nodes in the roadmap, which we construct using either learned or predefined distance metrics. At runtime, the roadmap generates collision-free paths directly in image space, removing the need for a robot model or joint encoders. We validate our approach through an experimental study in which a robotic arm follows planned paths using an adaptive vision-based control scheme to avoid obstacles. The results show that paths generated with the learned-distance roadmap achieved 100% success in control convergence, whereas the predefined image space distance roadmap enabled faster transient responses but had a lower success rate in convergence
@article{chatterjee2025-image-space-roadmaps, title = {Image-Based Roadmaps for Vision-Only Planning and Control of Robotic Manipulators}, journal = {IEEE Robotics and Automation Letters}, publisher = {Institute of Electrical and Electronics Engineers (IEEE)}, author = {Chatterjee, Sreejani and Gandhi, Abhinav and Calli, Berk and Chamzas, Constantinos}, year = {2025}, month = jul, volume = {10}, number = {8}, pages = {8530-8537}, url = {https://doi.org/10.1109/LRA.2025.3585760}, doi = {10.1109/LRA.2025.3585760} }
2024
- Expansion-GRR: Efficient Generation of Smooth Global Redundancy Resolution RoadmapsZ. Zhong, Z. Li, and C. ChamzasIn IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024
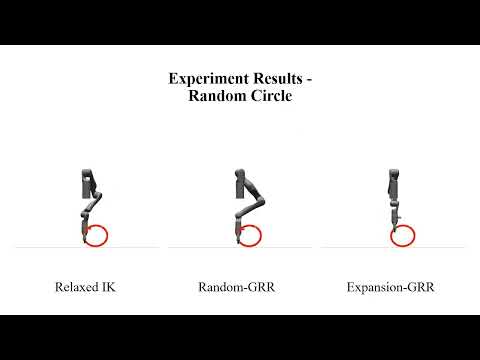
Global redundancy resolution (GRR) roadmaps is a novel concept in robotics that facilitates the mapping from task space paths to configuration space paths in a legible, predictable and repeatable way. Such roadmaps could find widespread utility in applications such as safe teleoperation, consistent path planning, and motion primitives generation. However, previous methods to compute GRR roadmaps often necessitate a lengthy computation time and produce non-smooth paths, limiting their practical efficacy. To address this challenge, we introduce a novel method Expansion-GRR that leverages efficient configuration space projections and enables rapid generation of smooth roadmaps that satisfy the task constraints. Additionally, we propose a simple multi-seed strategy that further enhances the final quality. We conducted experiments in simulation with a 5-link planar manipulator and a Kinova arm. We were able to generate the Expansion-GRR roadmaps up to 2 orders of magnitude faster while achieving higher smoothness. We also demonstrate the utility of the GRR roadmaps in teleoperation tasks where our method outperformed prior methods and reactive IK solvers in terms of success rate and solution quality
@inproceedings{zhong20240expansion-grr, author = {Zhong, Zhuoyun and Li, Zhi and Chamzas, Constantinos}, title = {Expansion-GRR: Efficient Generation of Smooth Global Redundancy Resolution Roadmaps}, year = {2024}, url = {https://arxiv.org/abs/2405.13770}, month = oct, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems} } - Annual Reviews
 Sampling-Based Motion Planning: A Comparative ReviewA. Orthey, C. Chamzas, and L. KavrakiAnnual Review of Control, Robotics, and Autonomous Systems, 2024
Sampling-Based Motion Planning: A Comparative ReviewA. Orthey, C. Chamzas, and L. KavrakiAnnual Review of Control, Robotics, and Autonomous Systems, 2024Sampling-based motion planning is one of the fundamental paradigms to generate robot motions, and a cornerstone of robotics research. This comparative review provides an up-to-date guideline and reference manual for the use of sampling-based motion planning algorithms. This includes a history of motion planning, an overview about the most successful planners, and a discussion on their properties. It is also shown how planners can handle special cases and how extensions of motion planning can be accommodated. To put sampling-based motion planning into a larger context, a discussion of alternative motion generation frameworks is presented which highlights their respective differences to sampling-based motion planning. Finally, a set of sampling-based motion planners are compared on 24 challenging planning problems. This evaluation gives insights into which planners perform well in which situations and where future research would be required. This comparative review thereby provides not only a useful reference manual for researchers in the field, but also a guideline for practitioners to make informed algorithmic decisions.
@article{orthey2024-review-sampling, author = {Orthey, Andreas and Chamzas, Constantinos and Kavraki, Lydia E.}, title = {Sampling-Based Motion Planning: A Comparative Review}, journal = {Annual Review of Control, Robotics, and Autonomous Systems}, volume = {7}, number = {1}, pages = {285-310}, year = {2024}, doi = {10.1146/annurev-control-061623-094742}, url = {https://doi.org/10.1146/annurev-control-061623-094742}, month = jul }
2023
- Meta-Policy Learning over Plan Ensembles for Robust Articulated Object ManipulationC. Chamzas, C. Garrett, B. Sundaralingam, L. Kavraki, and D. FoxIn RSS 2023: Workshop on Learning for Task and Motion Planning, 2023
Model-based robotic planning techniques, such as inverse kinematics and motion planning, can endow robots with the ability to perform complex manipulation tasks, such as grasping, object manipulation, and precise placement. However, these methods often assume perfect world knowledge and leverage approximate world models. For example, tasks that involve dynamics such as pushing or pouring are difficult to address with model-based techniques as it is difficult to obtain accurate characterizations of these object dynamics. Additionally, uncertainty in perception prevents them populating an accurate world state estimate. In this work, we propose using a model-based motion planner to build an ensemble of plans under different environment hypotheses. Then, we train a meta-policy to decide online which plan to track based on the current history of observations. By leveraging history, this policy is able to switch ensemble plans to circumvent getting "stuck" in order to complete the task. We tested our method on a 7-DOF Franka-Emika robot pushing a cabinet door in simulation. We demonstrate that a successful meta-policy can be trained to push a door in settings high environment uncertainty all while requiring little data.
@misc{chamzas2023-metapolicy, author = {Chamzas, Constantinos and Garrett, Caelan and Sundaralingam, Balakumar and Kavraki, Lydia E. and Fox, Dieter}, booktitle = {RSS 2023: Workshop on Learning for Task and Motion Planning}, month = jul, title = {Meta-Policy Learning over Plan Ensembles for Robust Articulated Object Manipulation}, year = {2023}, url = {https://openreview.net/forum?id=68N8Dj6KVv} }
2022
- Comparing Reconstruction-and Contrastive-based Models for Visual Task PlanningC. Chamzas*, M. Lippi*, M. C. Welle*, A. Varava, L. E. Kavraki, and D. KragicIn IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022
Learning state representations enables robotic planning directly from raw observations such as images. Most methods learn state representations by utilizing losses based on the reconstruction of the raw observations from a lower-dimensional latent space. The similarity between observations in the space of images is often assumed and used as a proxy for estimating similarity between the underlying states of the system. However, observations commonly contain task-irrelevant factors of variation which are nonetheless important for reconstruction, such as varying lighting and different camera viewpoints. In this work, we define relevant evaluation metrics and perform a thorough study of different loss functions for state representation learning. We show that models exploiting task priors, such as Siamese networks with a simple contrastive loss, outperform reconstruction-based representations in visual task planning.
@inproceedings{chamzas2022-contrastive-visual-task-planning, title = {Comparing Reconstruction-and Contrastive-based Models for Visual Task Planning}, author = {Chamzas*, Constantinos and Lippi*, Martina and C. Welle*, Michael and Varava, Anastasia and E. Kavraki, Lydia and Kragic, Danica}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems}, month = oct, pages = {12550-12557}, doi = {10.1109/IROS47612.2022.9981533}, year = {2022}, url = {https://doi.org/10.1109/IROS47612.2022.9981533} } - Adaptive Experience Sampling for Motion Planning using the Generator-Critic FrameworkY. Lee, C. Chamzas, and L. E. KavrakiIEEE Robotics and Automation Letters, 2022
Sampling-based motion planners are widely used for motion planning with high-dof robots. These planners generally rely on a uniform distribution to explore the search space. Recent work has explored learning biased sampling distributions to improve the time efficiency of these planners. However, learning such distributions is challenging, since there is no direct connection between the choice of distributions and the performance of the downstream planner. To alleviate this challenge, this paper proposes APES, a framework that learns sampling distributions optimized directly for the planner’s performance. This is done using a critic, which serves as a differentiable surrogate objective modeling the planner’s performance - thus allowing gradients to circumvent the non-differentiable planner. Leveraging the differentiability of the critic, we train a generator, which outputs sampling distributions optimized for the given problem instance. We evaluate APES on a series of realistic and challenging high-dof manipulation problems in simulation. Our experimental results demonstrate that APES can learn high-quality distributions that improve planning performance more than other biased sampling baselines.
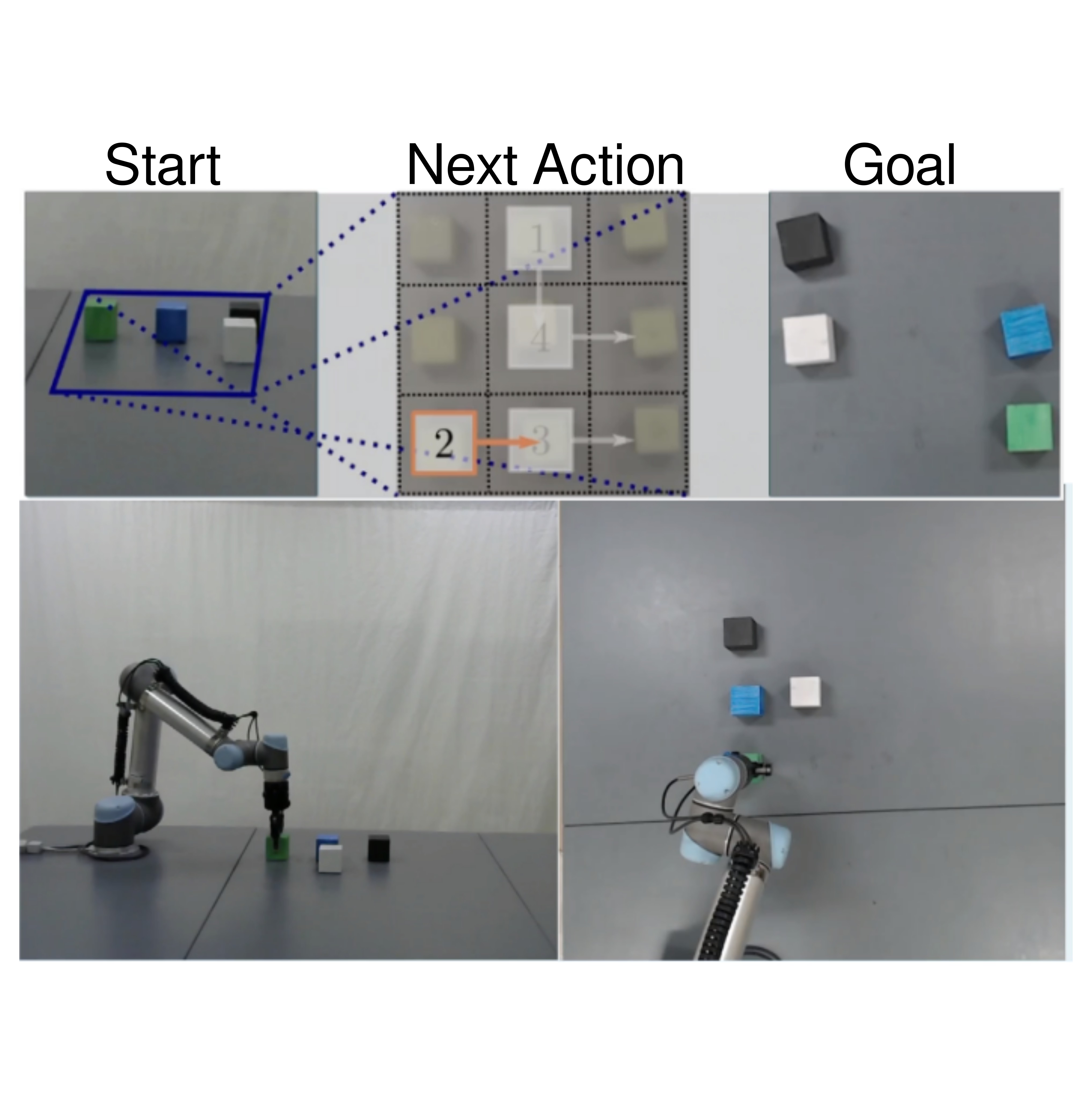
@article{lee2022-apes, title = {Adaptive Experience Sampling for Motion Planning using the Generator-Critic Framework}, journal = {IEEE Robotics and Automation Letters}, volume = {7}, number = {4}, pages = {9437-9444}, issn = {2377-3766}, doi = {10.1109/LRA.2022.3191803}, author = {Lee, Yiyuan and Chamzas, Constantinos and E. Kavraki, Lydia}, year = {2022}, month = jul, url = {https://dx.doi.org/10.1109/LRA.2022.3191803} } - Learning to Retrieve Relevant Experiences for Motion PlanningC. Chamzas, A. Cullen, A. Shrivastava, and L. E. KavrakiIn IEEE International Conference on Robotics and Automation, 2022
Recent work has demonstrated that motion planners’ performance can be significantly improved by retrieving past experiences from a database. Typically, the experience database is queried for past similar problems using a similarity function defined over the motion planning problems. However, to date, most works rely on simple hand-crafted similarity functions and fail to generalize outside their corresponding training dataset. To address this limitation, we propose (FIRE), aframework that extracts local representations of planning problems and learns a similarity function over them. To generate the training data we introduce a novel self-supervised method that identifies similar and dissimilar pairs of local primitives from past solution paths. With these pairs, a Siamese network is trained with the contrastive loss and the similarity function is realized in the network’s latent space. We evaluate FIRE on an 8-DOF manipulator in five categories of motion planning problems with sensed environments. Our experiments show that FIRE retrieves relevant experiences which can informatively guide sampling-based planners even in problems outside its training distribution, outperforming other baselines.
@inproceedings{chamzas2022-learn-retrieve, author = {Chamzas, Constantinos and Cullen, Aedan and Shrivastava, Anshumali and E. Kavraki, Lydia}, booktitle = {IEEE International Conference on Robotics and Automation}, month = may, pages = {7233--7240}, doi = {10.1109/ICRA46639.2022.9812076}, title = {Learning to Retrieve Relevant Experiences for Motion Planning}, url = {https://doi.org/10.1109/ICRA46639.2022.9812076}, year = {2022} } - Human-Guided Motion Planning in Partially Observable EnvironmentsC. Quintero-Peña*, C. Chamzas*, Z. Sun, V. Unhelkar, and L. E. KavrakiIn IEEE International Conference on Robotics and Automation, 2022
Motion planning is a core problem in robotics, with a range of existing methods aimed to address its diverse set of challenges. However, most existing methods rely on complete knowledge of the robot environment; an assumption that seldom holds true due to inherent limitations of robot perception. To enable tractable motion planning for high-DOF robots under partial observability, we introduce BLIND, an algorithm that leverages human guidance. BLIND utilizes inverse reinforcement learning to derive motion-level guidance from human critiques. The algorithm overcomes the computational challenge of reward learning for high-DOF robots by projecting the robot’s continuous configuration space to a motion-planner-guided discrete task model. The learned reward is in turn used as guidance to generate robot motion using a novel motion planner. We demonstrate BLIND using the Fetch robot an dperform two simulation experiments with partial observability. Our experiments demonstrate that, despite the challenge of partial observability and high dimensionality, BLIND is capable of generating safe robot motion and outperforms baselines on metrics of teaching efficiency, success rate, and path quality.
@inproceedings{quintero-chamzas2022-blind, author = {Quintero-Pe{\~n}a*, Carlos and Chamzas*, Constantinos and Sun, Zhanyi and Unhelkar, Vaibhav and E. Kavraki, Lydia}, booktitle = {IEEE International Conference on Robotics and Automation}, month = may, pages = {7226-7232}, doi = {10.1109/ICRA46639.2022.9811893}, title = {Human-Guided Motion Planning in Partially Observable Environments}, url = {https://doi.org/10.1109/ICRA46639.2022.9811893}, year = {2022} } - MotionBenchMaker: A Tool to Generate and Benchmark Motion Planning DatasetsC. Chamzas, C. Quintero-Peña, Z. Kingston, A. Orthey, D. Rakita, M. Gleicher, M. Toussaint, and L. E. KavrakiIEEE Robotics and Automation Letters, 2022
Recently, there has been a wealth of development in motion planning for robotic manipulationnew motion planners are continuously proposed, each with its own unique set of strengths and weaknesses. However, evaluating these new planners is challenging, and researchers often create their own ad-hoc problems for benchmarking, which is time-consuming, prone to bias, and does not directly compare against other state-of-the-art planners. We present MotionBenchMaker, an open-source tool to generate benchmarking datasets for realistic robot manipulation problems. MotionBenchMaker is designed to be an extensible, easy-to-use tool that allows users to both generate datasets and benchmark them by comparing motion planning algorithms. Empirically, we show the benefit of using MotionBenchMaker as a tool to procedurally generate datasets which helps in the fair evaluation of planners. We also present a suite of over 40 prefabricated datasets, with 5 different commonly used robots in 8 environments, to serve as a common ground for future motion planning research.
@article{chamzas2022-motion-bench-maker, title = {MotionBenchMaker: A Tool to Generate and Benchmark Motion Planning Datasets}, volume = {7}, number = {2}, pages = {882–889}, issn = {2377-3766}, doi = {10.1109/LRA.2021.3133603}, journal = {IEEE Robotics and Automation Letters}, author = {Chamzas, Constantinos and Quintero-Pe{\~n}a, Carlos and Kingston, Zachary and Orthey, Andreas and Rakita, Daniel and Gleicher, Michael and Toussaint, Marc and E. Kavraki, Lydia}, year = {2022}, month = apr, url = {https://dx.doi.org/10.1109/LRA.2021.3133603} } - NAM
 Human Health and Equity in an Age of Robotics and Intelligent MachinesC. Chamzas*, F. Eweje*, L. Kavraki, and E. ChaikofNational Academy of Medicine Perspectives, 2022
Human Health and Equity in an Age of Robotics and Intelligent MachinesC. Chamzas*, F. Eweje*, L. Kavraki, and E. ChaikofNational Academy of Medicine Perspectives, 2022Advances in robotic technologies and intelligent machines will transform the way clinicians care for members of our community within a variety of health care settings, including the home, and, perhaps of far greater importance, offer a means to create a much more accessible, adaptable, and equitable world for every member of society. Robotics have already entered the health care ecosystem, and their presence is rapidly expanding. Surgical robots have become a common fixture in many medical centers. Outside of North America, robotic systems have emerged to meet an acute and growing labor shortage within skilled nursing facilities in Japan and were recently used to limit social contact and mitigate the risk of COVID-19 in China and South Korea (Khan et al., 2020). Regardless of the setting or application, key challenges to fully integrating robotics into health care include the development of algorithms and methods that enable shared human-robot autonomy and collaboration in the real world, as well as technology deployment that is both cost-effective and culturally centered so that all communities may benefit. Exploiting the transformative potential of these technologies will require intensive collaboration among policy makers, regulators, entrepreneurs, researchers, health care providers, and especially those who would stand to benefit from or may be subject to risks due to the use of these technologies. This paper outlines areas in which robotics could make the largest and most immediate impact, discusses existing and emergent challenges to their implementation, and identifies areas in which implementers will need to pay specific attention to ensure equitable access for all.
@article{chamzas2022-health-robotics, author = {Chamzas*, Constantinos and Eweje*, Feyisayo and Kavraki, Lydia E and Chaikof, Elliot L}, journal = {National Academy of Medicine Perspectives}, publisher = {National Academy of Medicine}, title = {Human Health and Equity in an Age of Robotics and Intelligent Machines}, year = {2022}, url = {https://doi.org/10.31478/202203b} }

2021
- Using Experience to Improve Constrained Planning on Foliations for Multi-Modal ProblemsZ. Kingston, C. Chamzas, and L. E. KavrakiIn IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021
Many robotic manipulation problems are multi-modal—they consist of a discrete set of mode families (e.g., whether an object is grasped or placed) each with a continuum of parameters (e.g., where exactly an object is grasped). Core to these problems is solving single-mode motion plans, i.e., given a mode from a mode family (e.g., a specific grasp), find a feasible motion to transition to the next desired mode. Many planners for such problems have been proposed, but complex manipulation plans may require prohibitively long computation times due to the difficulty of solving these underlying single-mode problems. It has been shown that using experience from similar planning queries can significantly improve the efficiency of motion planning. However, even though modes from the same family are similar, they impose different constraints on the planning problem, and thus experience gained in one mode cannot be directly applied to another. We present a new experience-based framework, ALEF , for such multi-modal planning problems. ALEF learns using paths from single-mode problems from a mode family, and applies this experience to novel modes from the same family. We evaluate ALEF on a variety of challenging problems and show a significant improvement in the efficiency of sampling-based planners both in isolation and within a multi-modal manipulation planner.
@inproceedings{kingston2021experience-foliations, author = {Kingston, Zachary and Chamzas, Constantinos and E. Kavraki, Lydia}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems}, month = sep, title = {Using Experience to Improve Constrained Planning on Foliations for Multi-Modal Problems}, year = {2021}, pages = {6922-6927}, doi = {10.1109/IROS51168.2021.9636236}, url = {https://doi.org/10.1109/IROS51168.2021.9636236} } - HyperPlan: A Framework for Motion Planning Algorithm Selection and Parameter OptimizationM. Moll, C. Chamzas, Z. Kingston, and L. E. KavrakiIn IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021
Over the years, many motion planning algorithms have been proposed. It is often unclear which algorithm might be best suited for a particular class of problems. The problem is compounded by the fact that algorithm performance can be highly dependent on parameter settings. This paper shows that hyperparameter optimization is an effective tool in both algorithm selection and parameter tuning over a given set of motion planning problems. We present different loss functions for optimization that capture different notions of optimality. The approach is evaluated on a broad range of scenes using two different manipulators, a Fetch and a Baxter. We show that optimized planning algorithm performance significantly improves upon baseline performance and generalizes broadly in the sense that performance improvements carry over to problems that are very different from the ones considered during optimization.
@inproceedings{moll2021hyperplan, author = {Moll, Mark and Chamzas, Constantinos and Kingston, Zachary and E. Kavraki, Lydia}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems}, month = sep, title = {HyperPlan: A Framework for Motion Planning Algorithm Selection and Parameter Optimization}, year = {2021}, pages = {2511-2518}, doi = {10.1109/IROS51168.2021.9636651}, url = {https://doi.org/10.1109/IROS51168.2021.9636651} } - Motion Planning via Bayesian Learning in the DarkC. Quintero-Peña*, C. Chamzas*, V. Unhelkar, and L. E. KavrakiIn ICRA 2021: Workshop on Machine Learning for Motion Planning, 2021
(Spotlight)
Motion planning is a core problem in many applications spanning from robotic manipulation to autonomous driving. Given its importance, several schools of methods have been proposed to address the motion planning problem. However, most existing solutions require complete knowledge of the robot’s environment; an assumption that might not be valid in many real-world applications due to occlusions and inherent limitations of robots’ sensors. Indeed, relatively little emphasis has been placed on developing safe motion planning algorithms that work in partially unknown environments. In this work, we investigate how a human who can observe the robot’s workspace can enable motion planning for a robot with incomplete knowledge of its workspace. We propose a framework that combines machine learning and motion planning to address the challenges of planning motions for high-dimensional robots that learn from human interaction. Our preliminary results indicate that the proposed framework can successfully guide a robot in a partially unknown environment quickly discovering feasible paths.
@misc{quintero-chamzas2021-motion-planning-in-the-dark, author = {Quintero-Pe{\~n}a*, Carlos and Chamzas*, Constantinos and Unhelkar, Vaibhav and E. Kavraki, Lydia}, booktitle = {ICRA 2021: Workshop on Machine Learning for Motion Planning}, month = jun, title = {Motion Planning via Bayesian Learning in the Dark}, year = {2021}, url = {https://sites.google.com/utexas.edu/mlmp-icra2021/home} } - Learning Sampling Distributions Using Local 3D Workspace Decompositions for Motion Planning in High DimensionsC. Chamzas, Z. Kingston, C. Quintero-Peña, A. Shrivastava, and L. E. KavrakiIn IEEE International Conference on Robotics and Automation, 2021
(Top-4 finalist for best paper in Cognitive Robotics)
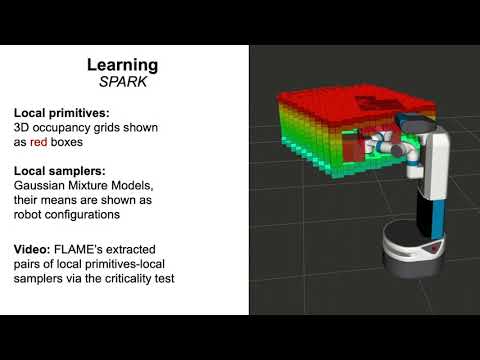
Earlier work has shown that reusing experience from prior motion planning problems can improve the efficiency of similar, future motion planning queries. However, for robots with many degrees-of-freedom, these methods exhibit poor generalization across different environments and often require large datasets that are impractical to gather. We present SPARK and FLAME , two experience-based frameworks for sampling- based planning applicable to complex manipulators in 3 D environments. Both combine samplers associated with features from a workspace decomposition into a global biased sampling distribution. SPARK decomposes the environment based on exact geometry while FLAME is more general, and uses an octree-based decomposition obtained from sensor data. We demonstrate the effectiveness of SPARK and FLAME on a real and simulated Fetch robot tasked with challenging pick-and- place manipulation problems. Our approaches can be trained incrementally and significantly improve performance with only a handful of examples, generalizing better over diverse tasks and environments as compared to prior approaches.
@inproceedings{chamzas2021-learn-sampling, author = {Chamzas, Constantinos and Kingston, Zachary and Quintero-Pe{\~n}a, Carlos and Shrivastava, Anshumali and E. Kavraki, Lydia}, booktitle = {IEEE International Conference on Robotics and Automation}, month = jun, title = {{Learning Sampling Distributions Using Local 3D Workspace Decompositions for Motion Planning in High Dimensions}}, year = {2021}, url = {https://dx.doi.org/10.1109/ICRA48506.2021.9561104}, doi = {10.1109/ICRA48506.2021.9561104}, pages = {1283-1289} } - Path Planning for Manipulation Using Experience-Driven Random TreesÈ. Pairet, C. Chamzas, Y. Petillot, and L. E. KavrakiIEEE Robotics and Automation Letters, 2021
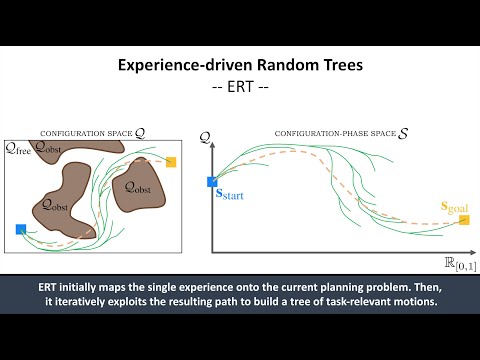
Robotic systems may frequently come across similar manipulation planning problems that result in similar motion plans. Instead of planning each problem from scratch, it is preferable to leverage previously computed motion plans, i.e., experiences, to ease the planning. Different approaches have been proposed to exploit prior information on novel task instances. These methods, however, rely on a vast repertoire of experiences and fail when none relates closely to the current problem. Thus, an open challenge is the ability to generalise prior experiences to task instances that do not necessarily resemble the prior. This work tackles the above challenge with the proposition that experiences are "decomposable" and "malleable", i.e., parts of an experience are suitable to relevantly explore the connectivity of the robot-task space even in non-experienced regions. Two new planners result from this insight: experience-driven random trees (ERT) and its bi-directional version ERTConnect. These planners adopt a tree sampling-based strategy that incrementally extracts and modulates parts of a single path experience to compose a valid motion plan. We demonstrate our method on task instances that significantly differ from the prior experiences, and compare with related state-of-the-art experience-based planners. While their repairing strategies fail to generalise priors of tens of experiences, our planner, with a single experience, significantly outperforms them in both success rate and planning time. Our planners are implemented and freely available in the Open Motion Planning Library.
@article{pairet2021-path-planning-for-manipulation, title = {Path Planning for Manipulation Using Experience-Driven Random Trees}, volume = {6}, issn = {2377-3774}, doi = {10.1109/lra.2021.3063063}, number = {2}, journal = {IEEE Robotics and Automation Letters}, publisher = {Institute of Electrical and Electronics Engineers (IEEE)}, author = {Pairet, {\`E}ric and Chamzas, Constantinos and Petillot, Yvan R. and E. Kavraki, Lydia}, year = {2021}, month = apr, pages = {3295–3302}, url = {https://dx.doi.org/10.1109/LRA.2021.3063063} } - cMinMax: A Fast Algorithm to Find the Corners of an N-dimensional Convex PolytopeD. Chamzas, C. Chamzas, and K. MoustakasIn 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications, 2021
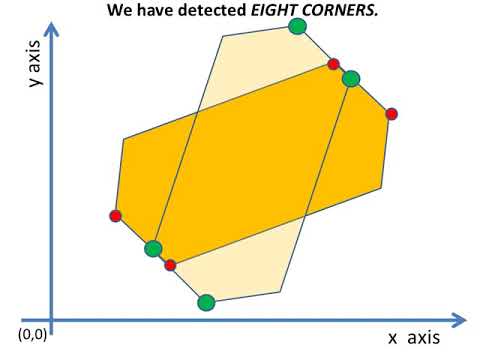
During the last years, the emerging field of Augmented Virtual Reality (AR-VR) has seen tremendous growth. At the same time there is a trend to develop low cost high-quality AR systems where computing power is in demand. Feature points are extensively used in these real-time frame-rate and 3D applications, therefore efficient high-speed feature detectors are necessary. Corners are such special features and often are used as the first step in the marker alignment in Augmented Reality (AR). Corners are also used in image registration and recognition, tracking, SLAM, robot path finding and 2D or 3D object detection and retrieval. Therefore there is a large number of corner detection algorithms but most of them are too computationally intensive for use in real-time applications of any complexity. Many times the border of the image is a convex polygon. For this special, but quite common case, we have developed a specific algorithm, cMinMax. The proposed algorithm is faster, approximatel y by a factor of 5 compared to the widely used Harris Corner Detection algorithm. In addition is highly parallelizable. The algorithm is suitable for the fast registration of markers in augmented reality systems and in applications where a computationally efficient real time feature detector is necessary. The algorithm can also be extended to N-dimensional polyhedrons.
@inproceedings{chamzas2021-cMinMax, title = {cMinMax: A Fast Algorithm to Find the Corners of an N-dimensional Convex Polytope}, isbn = {9789897584886}, doi = {10.5220/0010259002290236}, booktitle = {16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications}, publisher = {SCITEPRESS - Science and Technology Publications}, author = {Chamzas, Dimitrios and Chamzas, Constantinos and Moustakas, Konstantinos}, year = {2021}, pages = {229-236}, url = {https://dx.doi.org/10.5220/0010259002290236} }
2020
- State Representations in Robotics: Identifying Relevant Factors of Variation using Weak SupervisionC. Chamzas*, M. Lippi*, M. C. Welle*, A. Varava, M. Alessandro, L. E. Kavraki, and D. KragicIn NeurIPS, 3rd Robot Learning Workshop: Grounding Machine Learning Development in the Real World, 2020
Representation learning allows planning actions directly from raw observations. Variational Autoencoders (VAEs) and their modifications are often used to learn latent state representations from high-dimensional observations such as images of the scene. This approach uses the similarity between observations in the space of images as a proxy for estimating similarity between the underlying states of the system. We argue that, despite some successful implementations, this approach is not applicable in the general case where observations contain task-irrelevant factors of variation. We compare different methods to learn latent representations for a box stacking task and show that models with weak supervision such as Siamese networks with a simple contrastive loss produce more useful representations than traditionally used autoencoders for the final downstream manipulation task.
@misc{chamzas2020rep-learning, author = {Chamzas*, Constantinos and Lippi*, Martina and C. Welle*, Michael and Varava, Anastasiia and Alessandro, Marino and E. Kavraki, Lydia and Kragic, Danica}, booktitle = {NeurIPS, 3rd Robot Learning Workshop: Grounding Machine Learning Development in the Real World}, title = {State Representations in Robotics: Identifying Relevant Factors of Variation using Weak Supervision}, year = {2020}, month = dec, url = {https://www.robot-learning.ml/2020/} }
2019
- Using Local Experiences for Global Motion PlanningC. Chamzas, A. Shrivastava, and L. E. KavrakiIn IEEE International Conference on Robotics and Automation, 2019
Sampling-based planners are effective in many real-world applications such as robotics manipulation, navigation, and even protein modeling.However, it is often challenging to generate a collision-free path in environments where key areas are hard to sample. In the absence of any prior information, sampling-based planners are forced to explore uniformly or heuristically, which can lead to degraded performance. One way to improve performance is to use prior knowledge of environments to adapt the sampling strategy to the problem at hand. In this work, we decompose the workspace into local primitives, memorizing local experiences by these primitives in the form of local samplers, and store them in a database. We synthesize an efficient global sampler by retrieving local experiences relevant to the given situation. Our method transfers knowledge effectively between diverse environments that share local primitives and speeds up the performance dramatically. Our results show, in terms of solution time, an improvement of multiple orders of magnitude in two traditionally challenging high-dimensional problems compared to state-of-the-art approaches.
@inproceedings{chamzas2019using-local-experiences-for-global-motion-planning, author = {Chamzas, Constantinos and Shrivastava, Anshumali and E. Kavraki, Lydia}, booktitle = {IEEE International Conference on Robotics and Automation}, month = may, title = {Using Local Experiences for Global Motion Planning}, year = {2019}, pages = {8606--8612}, doi = {10.1109/ICRA.2019.8794317}, url = {https://dx.doi.org/10.1109/ICRA.2019.8794317} }